ai代写,ai作业代写,机器学习代写,python ai代写
The Canadarm2 motion planning environment
Canadarm2 is a remote-controlled mechanical arm aboard the International Space Station (ISS), see Fig-
ure 1. The robotic arm is used to deploy, capture and repair satellites, position astronauts, maintain equipment,
and move cargo. The rest of this specification document details the system and task.
The system: The simplified Canadarm operates in a 2D workspace (rather than 3D). In particular, the 2D 2
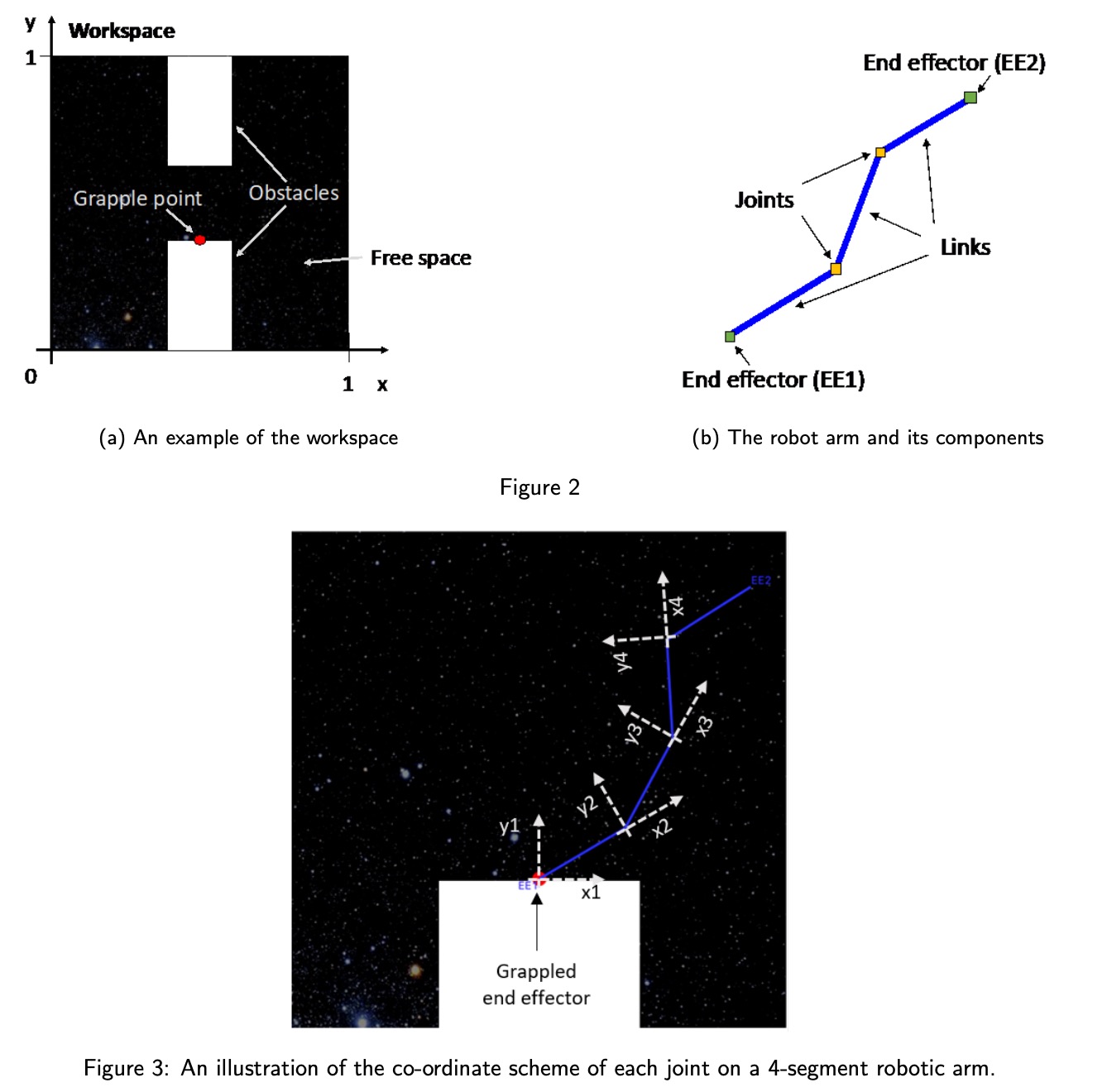
workspace is a plane, represented as [0, 1]×[0, 1] ⊂ R , and is populated by rectangular obstacles. In addition, there are grapple point(s) which the end effectors of the robotic arm can attach to. One of the end effectors must be grappled to a grapple point at any time. The exact dimensions and positions of each obstacle and the number and position of the grapple points in the environment are known prior to execution. Figure 2a illustrates this environment.
 ai代写,ai作业代写
ai代写,ai作业代写
The robotic arm is composed of x links and x joints, where x is a non-negative integer, with two end effectors EE1 and EE2, which can attach onto grapple points. An example robotic arm with 3 links is shown in Figure 2b. Each link of the robot is a line segment attached to a joint. The link connected to the grappled end effector acts as a joint. Each joint is a rotational joint which means it can only rotate. A local coordinate system is attached to each joint. The co-ordinate system of the joint at the location of the grappled end effector, coincides with the coordinate system of the end effector. For the remaining joints, the x-axis is the line that coincides with the previous link. We define the angle of segment-i as the angle between link-i and the X axis of the coordinate system attached to joint-i. The joints are numbered relative to the grappled end-effector. Figure 3 illustrates the rotational joints. In some tasks, the links are telescopic and can change length (i.e. when the specified min and max segment lengths differ). This allows the robotic arm to more easily reach the grapple points.
 ai作业代写,ai代写
ai作业代写,ai代写
Motion planning for Canadarm
This section describes what your program should do. Given the initial and goal configurations of the Canadarm robotic arm, as well as a map of the environment, your program must find a valid path from the initial to the goal configurations. A valid path means that when the Canadarm executes the path, it will satisfy the following requirements:
1. The path consists of primitive steps. In each primitive step, each joint of the robot arm cannot move more than 0.001 units (i.e. radians or arm length).
2. It will not collide with any of the obstacles
3. It will not collide with itself
4. The entire Canadarm robotic arm must lie inside the workspace
5. The angle between adjacent arm segments cannot be tighter than 15 degrees (i.e. angles 2, 3, 4... must be between -165◦ and +165◦).
6. The segment lengths must be within the bounds specified in the input file (i.e. within min and max lengths)
7. Since a primitive step is very small, it is sufficient to satisfy requirements 2-4 at the beginning and end of each primitive step.







